Estimation of multilink kinematics and dynamics: inertial/magnetic sensors and sensor fusion techniques
A seminar by prof. Angelo Cappello, prof. Roberto Diversi and dr Alberto Ferrari
-
Date:
29 JANUARY-31 JANUARY 2018from 10:00 to 13:00 -
Event location: Room 5.5, School of Architecture and Engineering, viale del Risorgimento 2, 40136 Bologna
-
Type: Course
Curriculum: Bioengineering
Agenda
Monday 29 January 2017
Room 5.5 – h 10.00 - 13.00
Prof. Roberto Diversi, PhD (DEI, University of Bologna)
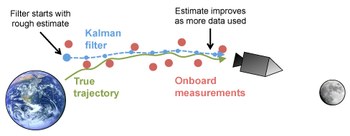
Stochastic state space models. Kalman filtering: standard assumptions. The predictor-corrector form. The Kalman predictor and the difference Riccati equation. The steady-state Kalman filter. Dealing with nonlinear models: the extended Kalman filter. Some examples.
Tuesday 30 January 2017
Room 5.5 – h 10.00 - 13.00
Prof. Angelo Cappello, PhD (DEI, University of Bologna)
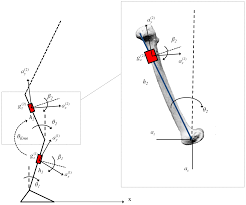
Multilink kinematics and dynamics. Inertial and magnetic sensors. Sensor fusion techniques. Application to direct and inverted pendulum. Experimental session: data acquisition and processing.
Wednesday 31 January 2017
Room 5.5 – h. 10.00 - 12.00
Dr. Alberto Ferrari, PhD (DEI, University of Bologna)
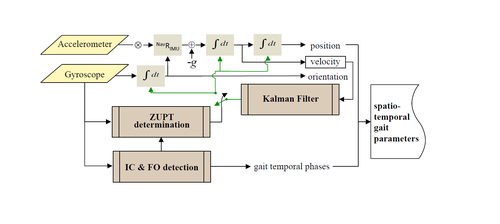
Strap-down integration methods to determine IMU orientation. Pedestrian dead-reckoning. Applying Zero Velocity Update to gait data by means of Kalman Filter to obtain accurate position information. Example of a Real time Indoor navigation system with possibility to set different constraint to improve position accuracy.
Wednesday 31 January 2017
Room 5.5 – h. 12.00 - h. 13.00
Discussion and projects assignment
CREDIT VALIDATION
Credit validation for the students of the doctoral programs is conditioned to passing the written exam assigned at the end of the course.
Contacts
Prof. Angelo Cappello
Subscribe
- Registration form Published